For systems with shafts that are not coaxial, shaft groups have to be added. For each group a position can be defined.
The positions can also be calculated by the software if constraints are used for positioning. See below.
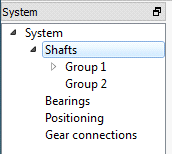
There are three types of groups:
1.Standard group: The standard group can have an arbitrary position and it can hold subgroups. Shafts in different groups can not be connected by supports.
2.Coaxial group: The coaxial group can only be positioned axially relative to its parent group. Shafts in different coaxial groups can be connected by rolling bearings or other supports.
3.Planetary group: A planetary group is needed to define planetary gear sets. The number of planets can be defined in addition to position. Shafts in a planetary group rotate around a planet carrier. The centrifugal loads caused by this rotation are considered. For bearings and other supports in planetary groups the result for each planet is shown in the results.